 咨詢熱線:4000-888-603
咨詢熱線:4000-888-603發表時間:2022-10-08?????責任編輯:極光創新
3D打印機的結構通常都是根據打印材料、打印要求而設計,但是其具體的機械結構都是有理可尋的。不同的3D打印技術都有著不同的結構,但同為增材制造都是逐層制造,所以其原理類似。對于3D打印機結構的研究不單單針對某一種打印技術,而應該是通用的結構。通過對現有的3D打印機的結構進行總結分析,有助于進一步推動3D打印機的發展。
1、3D打印機以坐標系類型分類
常見的3D打印機為了完成三維立體打印,都需要以不同的方式在三維空間中進行定點定位,這時就需要利用坐標系來實現定位。而在3D打印機研究進展中,常見的不外乎為笛卡爾坐標系結構、極坐標系結構兩種。
笛卡爾坐標系結構是最常見的結構,是在各種3D打印技術上都是十分普遍的結構。其優點在于結構簡單,方便制造,但其缺點也較明顯,由于采用直角坐標系,在進行弧面以及圓弧打印時,其只能通過圓弧插值的方法進行打印,就會導致打印精度較差,打印的圓弧面會有階梯狀的凸起。
常見的基于笛卡爾坐標系的3D打印機涉及X、Y、Z三個向的運動,而噴頭與打印平臺的運動方式可以歸納為3類:
(1)噴頭做X軸和Y軸方向的運動,打印平臺獨立做Z軸方向運動。該運動形式,噴頭較工作臺而言具有質量小、體積小等特點,適合高精度緊湊型3D打印機。但打印機噴頭在XY平面做復合運動會影響噴頭的正常出料,從而導致打印質量的下降。
(2)噴頭做X軸(或Y軸)和Z軸方向運動,打印平臺獨立做Y軸(或X軸)方向的運動。或者噴頭獨立做X軸(或Y軸)方向運動,工作臺做Y軸(或X軸)和Z軸方向的運動。這運動形式將Z軸與X軸(或 Y軸)結合進行復合運動,具有較小的運動慣量,且打印噴頭和工作平臺所需的運動空間較小,整體結構較為簡單,廣泛應用于小型家用3D打印機結構設計。
(3)打印平臺作X軸和Y軸方向的復合運動,噴頭僅在Z軸方向獨立運動。該運動形式的打印機結構簡單緊湊,但對于Z軸運動控制精度要求較高,由打印平臺在XY平面的移動需要較大的空間,且工作臺質量較大,不能用于較快速度的打印。
極坐標系結構則是在平面內由極點、極軸和極徑組成的坐標系,由于其原理的特殊性,所以其打印結構可以簡化,從而使其運行安靜,外形別致,把復雜機械結構完成的動作都交給軟件端來完成,盡量保持機械結構的簡單。
其優點在于可以用較小的3D打印機打印較大的物件,且可以較高精度的打印弧面,有打印速度快,穩定性好和控制簡單等;缺點就是對軟件部分要求較高,需要大量計算。
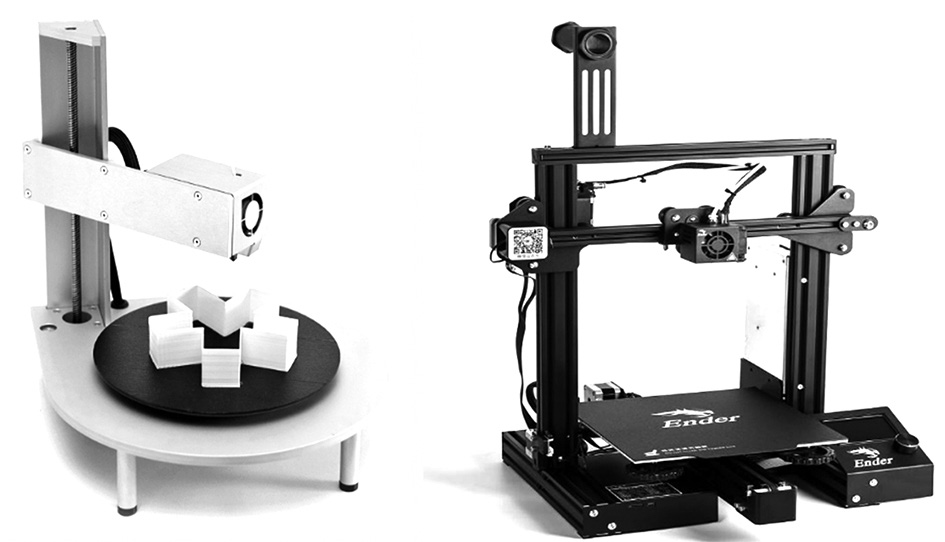
極坐標系(左)與直角坐標系(右)3D打印機
2、3D打印機以外觀結構分類
目前極光創新商用3D打印機的外觀結構主要有三角型結構、矩形桿式結構、矩形盒式結構、并聯臂結構這四類,不同的結構有著各自的特點以及使用場景,如下圖所示。
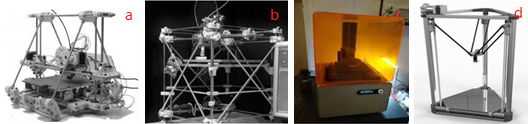
(a)為三角型結構(b)為矩形桿式結構(c)為矩形盒式結構(d)為并聯臂結構
不同外形結構的3D打印機
三角型結構是以三角形框架組成,框架呈屋頂形,外觀結構小巧,結構簡單,由于其結構優勢,打印噴頭在支架中樣沿X、Z軸運動,在Y軸方向可以伸出較遠,增加了Y軸方向的打印尺寸。而其缺點在于機體的制作精度較低,通常只能達到mm級,在打印時打印物體隨熱床在Y軸前后移動容易導致黏附不牢。
矩形桿式結構是一個立方體結構,通常由桿件與固定件搭建成框架結構,打印噴頭安裝在框架內部與工作平臺進行運動組合,完成三維立體的打印。矩形桿式結構不但能媲美盒式結構組裝精度,還同樣具有三角形結構簡單可靠的特點。但是其同樣具有打印過程抖動較大,容易產生較大的位置誤差,打印過程難以維持工作臺的水平。
矩形盒式結構是商業化最為普遍的形式,從整個3D打印的發展歷程來看,這種形式的機器也是發展較為完整的機器。整體安裝精度高,商業化的3D打印機通常都會采用這種結構。通常采用矩形盒式結構的FDM技術的3D打印機,內部多用同步帶結構,當打印速度過快時會產生較大的振動,影響打印精度。此種結構不只是FDM技術的3D打印機會采用,其他類型的打印技術也經常采用。
并聯臂結構是一種閉鏈機構,其中較為典型的并聯機構有Delta結構與Stewart結構,其中Delta結構是一種早先應用于機械臂的并聯式運動結構。其通常采用三分支并聯臂,根據各個分支在Z軸方向的運動,轉變為噴頭在三維空間的運動,從而實現三維打印。
該種結構較簡單,而且打印精度高,打印速度快,缺點就在于需要大量的計算將各個分支的Z軸運動轉變為噴頭的運動。該種結構具有優良的性能,只是對軟件要求較高,在3D打印機領域具有重要的發展前景。
3D打印機都是通過打印平臺黏接固定打印零件,在Z軸方向逐層堆疊,從而形成三維立體結構。不管是FDM技術還是SLS技術的其成型原理一致,所以其大體結構存在相似性。
極光創新來告訴你:傳統的3D打印機都是由外部框架支撐,以電機為動力源,以同步帶或者絲桿等機構進行傳動,根據實際需求選擇噴頭與打印工作臺的運動形式,從而完成立體結構的打印。常見的光固化打印技術與選擇性激光燒結技術這類3D打印技術略有不同,其類型的3D打印機沒有噴頭,但有材料供給的機構,其機構原理類似與噴頭,都是將材料送至打印區域。
傳統的3D打印機,在日漸發展的3D打印中已經不能滿足打印需求,目前主流的3D打印機已經從之前的三自由度機構逐步向多自由度發展,3D打印機的噴頭機構也同樣在進行改變,從單口向多口發展。結構也不在局限于簡單的結構,目前已經有將5自由度的機械臂用于3D打印機,或者結合并聯結構增加工作平臺的自由度從而實現多自由的打印。







 收藏
收藏 設為首頁
設為首頁
